
18. Februar 2021
Berücksichtigung von biegekritischen Drehzahlen zur Fehlervermeidung bei Lineareinheiten mit Spindelantrieben
Wie die Drehzahl einer Spindel mit einer etwaigen Geräuschentwicklung zusammenhängt und wie sich auftretende Störungen innerhalb Ihrer Anlage vermeiden lassen, erfahren Sie in diesem Blogeintrag. Darüber hinaus betrachten wir in diesem Artikel, wie sich die Auswahl einer Spindelsteigung auf einen gewünschten Fahrweg innerhalb einer vorgegebenen (Takt)Zeit auswirkt.
Gerade bei umlaufenden Wellen können durch das Erreichen bestimmter Drehzahlen unzulässig starke Schwingungen auftreten. Hervorgerufen werden diese durch zu hohe Schwingungsamplituden, die sich negativ auf das Antriebssystem auswirken können. Kommt es dazu, dass sich die auftretenden Schwingungen bei einer bestimmten Winkelgeschwindigkeit (Formel: Winkelgeschwindigkeit ω = 2πn, mit Drehzahl n) überlagern, entstehen Resonanzschwingungen. Wird also eine sogenannte biegekritische Drehzahl erreicht, gerät die rotierende Spindelwelle in Resonanz, schlägt aus und verursacht somit unter anderem ungewollte Störgeräusche. An dieser Stelle ist zu erwähnen, dass Resonanzschwingungen nicht bei vertikal eingebauten Spindeln auftreten, sondern nur bei horizontal verbauten Spindelwellen.
Da Linearachsen mit Spindelantrieb stirnseitig fest oder los gelagert sind, ist der Ort an dem die maximale Biegung der rotierenden Spindel vorherrscht, in der Regel bei der Hälfte der Spindellänge vorzufinden. Neben einem erhöhten Lärmpegel, kann ein solcher Resonanzfall im schlimmsten Fall zum Bruch einer Spindel führen und die Linearachse unter Umständen irreparabel beschädigen.
Wie lassen sich biegekritische Drehzahlen vermeiden?
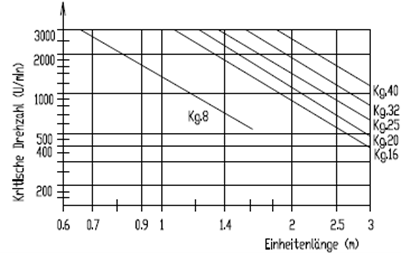
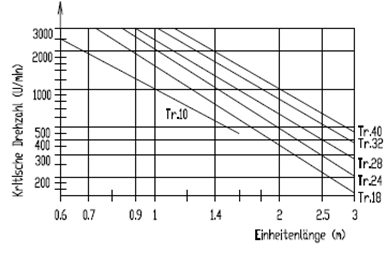
Um eine ruhig drehende Spindelwelle zu garantieren, ist zu empfehlen, dass die Steuerung des Antriebs so vorzunehmen ist, dass die Linearachse entweder unterhalb oder zügig oberhalb der kritischen Drehzahl fahren. Aus diesem Grund ist es wichtig zu wissen, bei welchen Drehzahlen solche kritischen Zustände auftreten können. Zur korrekten Dimensionierung der Spindelwelle und der zulässigen Drehzahl können die nachfolgenden Drehzahl-Diagramme aus dem Produktkatalog der Firma Bahr Modultechnik verwendet werden. Auf der Abszisse ist die Länge einer Spindeleinheit in Meter und auf der Ordinate die kritische Drehzahl in Umdrehungen pro Minute logarithmisch aufgetragen.
Die Kennlinien sind für unterschiedliche Spindelwellendurchmesser in die Diagramme eingezeichnet und mit der Abkürzung der Spindelart (Kg. /. Tr.) sowie des Nenndurchmessers der Spindel eingetragen. Die Abkürzung Kg.16 steht dabei für ein Kugelgewindespindel mit einem Durchmesser von 16 mm. Tr. steht für die Trapezgewindespindel. In Abbildung 1 bzw. Abbildung 2 sind die Drehzahl-Diagramme für Kugelgewindespindeln und Trapezgewindespindeln abgebildet.
Eine häufig auftretende Ursache für eine starke Geräuschentwicklung bei Spindelantrieben ist eine verhältnismäßig lang konfigurierte Lineareinheit in Kombination mit hohen auftretenden Drehzahlen. Anhand des folgenden Beispiels wollen wir Ihnen aufzeigen, wie die biegekritische Drehzahl bestimmt werden kann:
Sie möchten für ihre Anwendung eine Spindeleinheit vom Typ QSK60 mit einer Einheitenlänge von 2,5 m und einer Kugelgewindespindel 16×5 (Durchmesser 16 mm, Steigung 5mm) einsetzen. Dabei soll die Lineareinheit, unter Berücksichtigung der Taktzeit, mit 2000 U/min angetrieben werden. Unter Verwendung des in Abbildung 1 dargestellten Drehzahl-Diagramms wählen wir auf der Abszisse eine Einheitenlänge von 2,5 m aus und steuern anschließend den Schnittpunkt mit der entsprechenden Kennlinie an (hier: Kg.16), um die kritische Drehzahl auf der Ordinate ablesen zu können. Die biegekritische Drehzahl beträgt in diesem Beispiel circa 600 U/min. Unter Beachtung eines Sicherheitsfaktors von 0,8, lässt sich anschließend die zulässige Drehzahl ermitteln. Durch Multiplikation der kritischen Drehzahl (600 U/min) mit dem Sicherheitsfaktor (0,8) ergibt sich eine zulässige Drehzahl von 480 U/min (600 U/min x 0,8 = 480 U/min). Eine höhere Drehzahl würde zur Überschreitung der biegekritischen Drehzahl und somit zu Resonanzschwingungen führen.
Da der Wert der zulässigen Drehzahl die vorgegebenen 2000 U/min deutlich unterschreitet, ist ein Verfahren der gewünschten Strecke in der vorgegebenen Zeit nicht möglich. Um den Hub in der ausgewählten Taktzeit dennoch realisieren zu können, besteht die Möglichkeit die Spindelsteigung zu variieren. So gibt es bspw. die Möglichkeit einen Linearantrieb vom Typ QSK80 mit einer 20×20 Kugelgewindespindel einzusetzen. Mit dieser Konfiguration lassen sich anstelle von 5 mm bereits 20 mm Fahrweg pro Umdrehung erreichen. Zu Folge hat dies, dass nur ein Viertel der ursprünglichen 2000 U/min benötigt werden, um den vorgegebenen Weg zu verfahren. Wie in Abbildung 1 dargestellt, ist das kritische Drehmoment bei der ausgewählten Einheitenlänge mit 700 U/min ebenfalls höher angesiedelt als bei der ursprünglich ausgewählten QSK60. Durch die Modifizierung der Steigung und des Spindeldurchmessers können also die gewünschten Anwendungsparameter umgesetzt werden.